[[数据结构/实验/图|图]] 实验
易混点
- 无向图的堆成存储存的是图的下半部分
- 即使是有向图其邻接矩阵也不一定不对称,当每个节点的出度和入度相同的时候,结果是对称的。

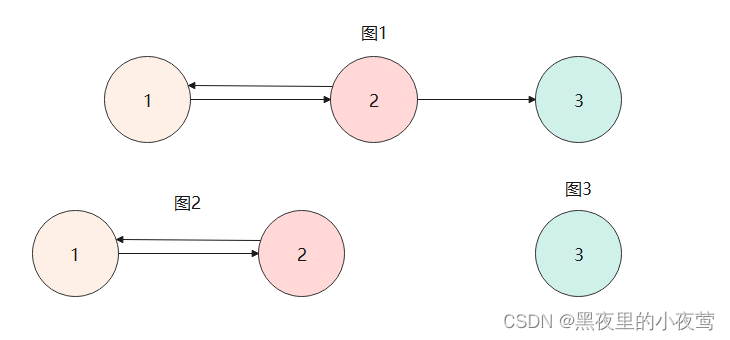
连通图、连通分量
- 原图的子图
- 连通分量本身连通
- 极大顶点数
- 极大边数:包含极大顶点所包含的所有边
存储
最基础的是邻接矩阵和邻接表法,不再赘述。
链式前向星
https://www.bilibili.com/video/BV1Mi4y1s7Yi 由 head 中引出指针指向其一个邻接点,然后通过链表存储其余邻接点(以及对应边的权重),最终指向数组的开头,这样便存储了一个节点及其周围的邻接点。
表示
- 图的邻接矩阵类型封装 教材中的多重 typedef 定义cpp实质上是把图的存储结构封装在结构体中,用一个
typedef struct GNode *PtrToNode; struct GNode{ int nv; int ne; int G[100][100]; }; typedef PtrToNode MGraph;PtrToNode的指针指向这个存储结构,并将指针定义为Mgraph类型。 本质上是为了通过指针去访问图结构。 - 边的类型定义 类型区分
- 初始化
typedef int Vertex; /* 用顶点下标表示顶点,为整型 */
MGraph CreateGraph(int VertexNum)
{
Vertex V, W;
MGraph Graph;
Graph = (MGraph)malloc(sizeof(struct GNode));
Graph->Nv = VertexNum;
Graph->Ne = 0;
/* 注意:这里默认顶点编号从0开始,到(Graph->Nv - 1) */
for (V = 0; V < Graph->Nv; V++)
for (W = 0; W < Graph->Nv; W++)
Graph->G[V][W] = 0; /* 或INFINITY */
return Graph;
}无权单源最短路
通过 dist,path 分别记录整个图中每个节点到 源点 S的距离,以及最短路径在该节点之前的那个节点。 每次访问节点后,更新距离为之前节点距离+1,并标记前一个节点。 算法正确性 该算法本质上还是一个广搜,所以是进行的层序遍历,因此每次访问到的节点就是最短的,并且限制了对节点的重复访问,故算法正确。 时间复杂度 每个节点都被入队、出队一次,每条边访问了一次(for 循环找每个邻接点),故时间复杂度为
有权单源最短路
负值圈
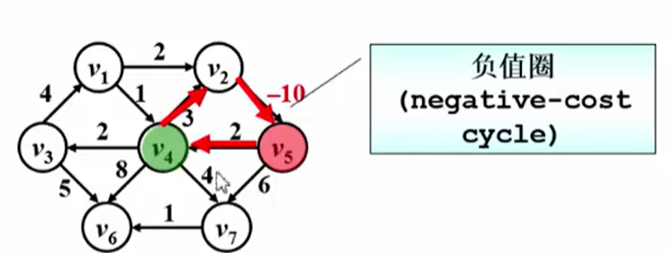 Dijkstra 和 Floyd 都不允许出现负值圈,否则会重复降路径代价越降越低。
Dijkstra 和 Floyd 都不允许出现负值圈,否则会重复降路径代价越降越低。
Dijkstra 算法
顶点集合,其中的顶点的最短路径都已经确认:
对未收录的顶点
- 初始化所有点的
dist和path信息,设定源点path为 0,在初始化过程中更新源点邻接点的dist和path信息 - 在未标记节点中寻找距离最短的节点,收录这个点
- 更新其邻接点的距离 注意这个所谓寻找最短节点是指距离源点
距离最短的节点,因为一开始所有的节点(除源点)这个距离都被标记为 ,所以每次找到的最短点之前的向前的邻接点之前必然被标记过(因为这些非 点本身就是由之前的点扩展来的),所以每次新增的点必然与之前标记过的节点连通。
具体实现+优化 [[Dijkstra]]
有权多源最短路
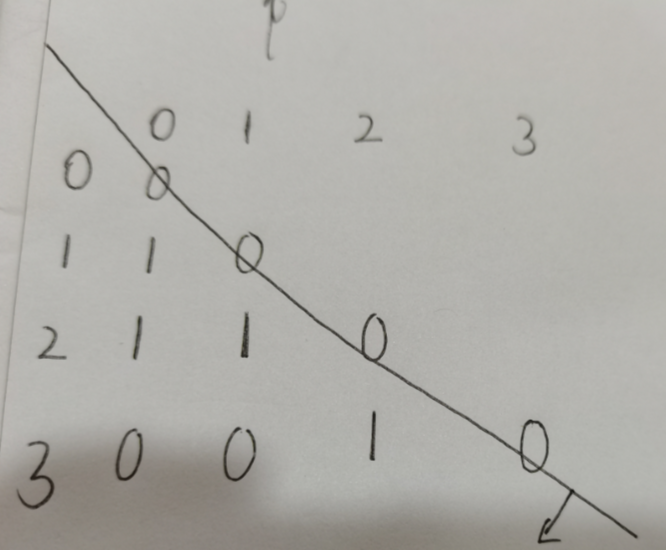
Floyd 算法
初始状态
若满足,则更新当前点的最短路径长度及前向节点,得到演变后的矩阵  最后会得到最终的
最后会得到最终的  其中
其中
#include <bits/stdc++.h>
using namespace std;
#define NODE_NUM 3
#define M 1000
struct Mgraph{
int nv;
int ne;
int G[NODE_NUM][NODE_NUM];
};
void out(int a[NODE_NUM][NODE_NUM]){
//output
for(int i = 0;i<NODE_NUM;i++){
for(int j = 0;j<NODE_NUM;j++){
cout << a[i][j] << " ";
}
cout << endl;
}
}
bool Floyd(Mgraph g){
int D[NODE_NUM][NODE_NUM];
int path[NODE_NUM][NODE_NUM];
//init
for(int i = 0;i<g.nv;i++){
for(int j = 0;j<g.nv;j++){
D[i][j] = g.G[i][j];
path[i][j] = -1;
}
}
for(int k = 0;k<g.nv;k++){//矩阵角标(中间点)
for(int i = 0;i<g.nv;i++){
for(int j = 0;j<g.nv;j++){
if(D[i][j] > D[i][k] + D[k][j]){//i->j
D[i][j] = D[i][k] + D[k][j];
if(i == j && D[i][j] < 0){
return false;
}
path[i][j] = k;
}
}
}
}
out(D);
cout << endl;
out(path);
return true;
}
int main(int argc, char const *argv[])
{
Mgraph g;
g.nv = 3;
g.ne = 5;
int gr[NODE_NUM][NODE_NUM] =
{
{0,4,11},
{6,0,2},
{3,M,0}
};
memcpy(g.G, gr, sizeof(gr));
Floyd(g);
return 0;
}最小生成树
强连通图
图中任意一对顶点
强连通分量
在图的连通分量基础上要求这个图是强连通的。
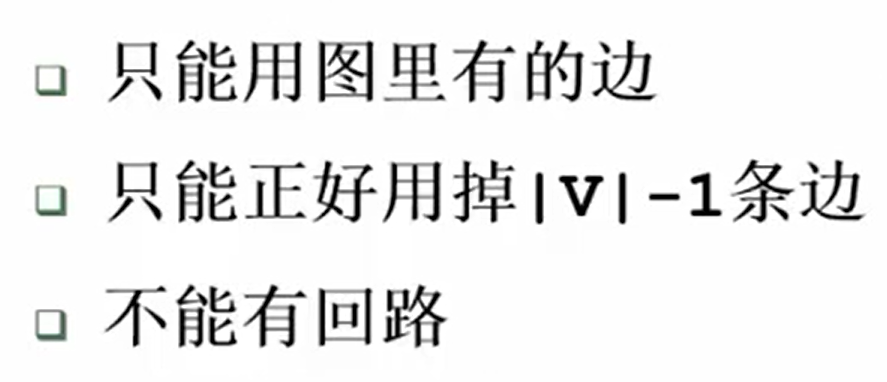
生成树
图 
有向树
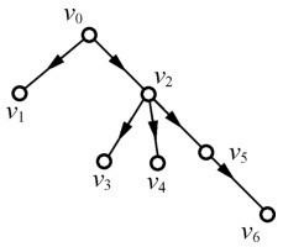 根节点入度为 0,其余父节点入度为 1。
根节点入度为 0,其余父节点入度为 1。
生成森林
对应各个连通分量的各课生成树。
最小生成树就是从生成森林中寻找各边权重和最小的生成树。各算法实质是贪心,需要满足约束条件: